第101回コラム
ロボットによるアクティブセンシングと身体性
情報アーキテクチャ専攻 成田 雅彦 教授
実世界データを多くのセンサーで収集し、インターネットワークで蓄積し分析するIoTが広く注目されている。筆者は、このモデルを発展させ、サービスロボットを用いたアクティブセンシングモデルを提唱している。本稿では、このアクティブセンシングモデルとそのシステム、観光地やイベントにて実施した数々の実証実験について紹介し、ロボットの身体性について考察する。
1. サービスロボットによるアクティブセンシングモデル
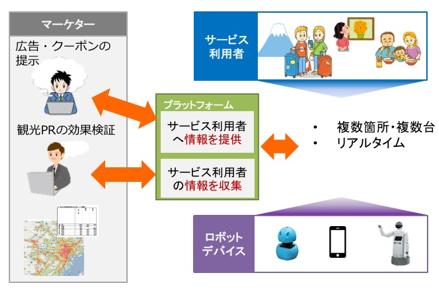
サービスロボットを用いて直接の利用者にサービスを提供すると同時に、ロボットから話しかけ、アンケート等により利用者の趣向情報を収集し活用するモデルであり、得られた情報を別のステークホルダーが利用できる特徴がある (図1)。アンケートは既に心理学分野などで調査手法が深く研究されておりその成果も活用できる。ロボットによるアンケートは、アンケート収集を自動化できると同時に、アンケートシステムを任意の実空間へ配備することができる。さらに、ロボットのインタラクションにより、来訪者を惹きつけ、回答の途中離脱を防ぐなどの効果が期待できる。従来、サービスロボットでは直接の利用者へのサービス提供のみに注意を払っていたが、費用対効果が不十分で、普及が十分ではなかった。アクティブセンシングモデルによりロボットにより取得したデータを活用でき、観光、商店街、イベントなどの産業領域へのサービスロボットの利用が期待でき、サービスロボットのエコシステムを改善する可能性を秘めている。
2. サービスロボットによる実装
実装は、アンケートをベースとした会話機能など上位レベルの機能モジュール、このモジュールを活用するスタンプラリーサービスなどのアプリケーションとして、ロボットとクラウド上に、非専門家向け開発フレームワークとサービスロボット向けの分散システムのためのプロトコルであるRSNPの上に構築した。アンケートは、クラウド上で生成され、回答はクラウド常に蓄積され、分析、利用される。
このシステムで用いるロボットは、利用者との会話が中心であることから、移動する必然性が薄い。従って、タッチパネル式ディスプレイやタブレットPCベースで等身大にスタンドで固定した低費用のサイネージロボット(図2)や、ロボットでの回答の代わりに、アプリインストール無しでスマートフォンから回答できるスマホロボを開発し用いている。結果、安価なシステムが提供できた。サイネージロボットでは移動しない代わりに、顔の表現や動き、声による応答に重点を置き、目が瞬きし、音声発話にあわせ口が動き(リップシンク)、相槌を打つことでロボットらしい身体性を表現した。
3. イベントや観光地での実証実験
2で述べたシステムは、国際ロボット展2015、産業交流展2015、Japan Robot Week 2016 、国際ロボット展2017など、ビッグサイトで行われた大規模イベントや、国際学会であるIIAI AAI 2016、IIAI AAI 2017、観光地でもある深川資料館商店街などで実証実験を実施した。結果、会場で効果的にアンケートを取得しうることが検証できた。また、人数推移を感知するセンサーと組み合わせ、アンケート回答率、来場者の多い時間帯などの行動パターン、会場での移動パターンもわかる。このように、サービスロボットによるアクティブセンシングでは、イベント会場内での利用者の多様な行動をその場で収集できるところが特徴であり、従来のマーケティングを越える分析が行える可能性がある。
4. ロボットの身体性と「かしらロボ」
ロボットはアンケートの回答者に対して親みやすく集客が比較的容易である。しかしながら、サイネージロボットは2次元のディスプレイ上に顔表情を実現したものである。3次元の身体性を付与し、より集客へ効果を高めることを試み、サイネージロボットとほぼ同様な表情の表現、即ち、瞬きをし、リップシンクし、首がうなずく「かしらロボ」を開発した。一方、3Dモデリングでは、顔が稚拙と、利用者の興味を引かず、逆効果になることが予想され、ある程度の完成が要求される。また、多様な顔やキャラクターを表現する必要性も想定できる。こうした要件に対応するために、浄瑠璃人形を参考にした設計手法を考案し、3Dプリンタにて造形した(図3)。関係者からは予想以上の完成度の高さとのフィードバックが得られている。また国際ロボット展2017にて展示したところ長時間注視する外国人も見受けられ、概して、違和感はなかったと思われる。今後、効果について定量的な調査を行う。
5. まとめ
サービスロボットを用いたアクティブセンシングモデルについてコンセプトやシステム、イベントや観光地での実証実験、ロボットとその身体性の検証などの取り組みを紹介した。今後、より効果的なサービスロボットへの活用を試みていく予定である。
【参考文献】
Masahiko Narita, Daiki Aoki, Makie Miyauchi, Sachiko Nakagawa, Yosuke Tsuchiya, Nobuto Matsuhira, Demonstration experiments of a distributed questionnaire service using multiple robots with the aim of marketing at a tourist site, International Journal of Smart Computing and Artificial Intelligence (IJSCAI),2018, Vol.2, No.1, P.1 - 21, 2018
成田雅彦,土屋陽介,中川幸子,阿久津裕,泉井透,野見山大基,松日楽信人,本村陽一,"マーケティング分野への適用を目指したスタンプラリーとアンケートサービスのCRSPを用いた構築 ~クラウドベースのロボットサービス統合基盤の進展~",人工知能学会論文誌 vol. 32 No. 1, NFC-B_1-13,2017
成田雅彦,土屋陽介,泉井透,阿久津裕,安田福啓,中川幸子,松日楽信人,サービスロボットによる分散アンケートサービスの提案 ~非専門家向け開発フレームワークの応用~,日本ロボット学会誌,Vol.35, No.5,pp.43-53,2017
成田雅彦 ,サイネージロボットの身体性を実現する一提案 浄瑠璃人形の比較を参考にした「かしら」のモデリング,産業技術大学大学紀要,No.11, pp.91-96,2017